We are happy to announce that out article entitled “Improving Machine Learning-Based Robot Self-Collision Checking with Input Positional Encoding” was published in Foundations of Computing and Decision Sciences.
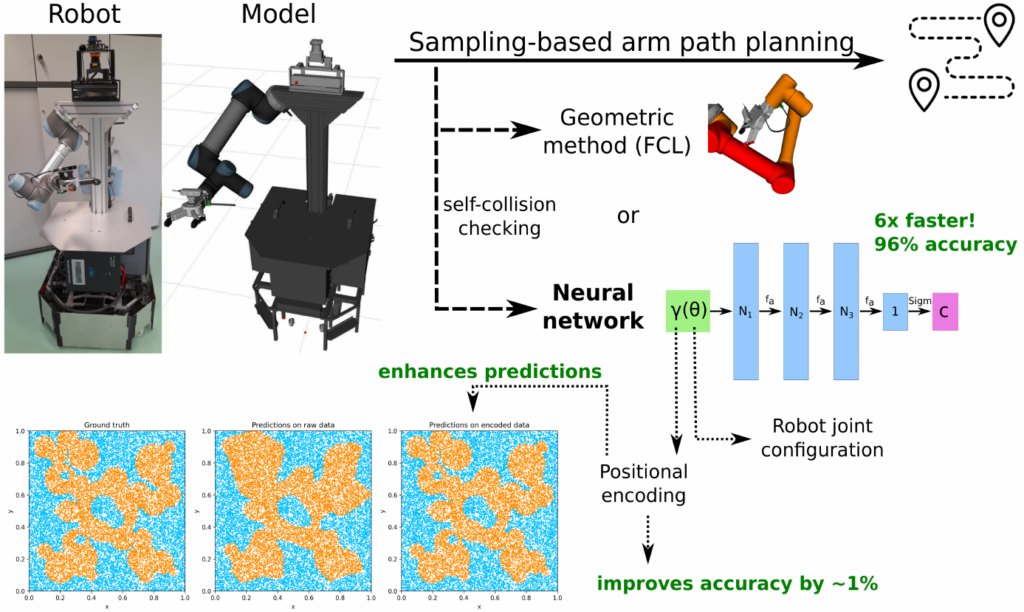
This manuscript investigates the integration of positional encoding – a technique widely used in computer graphics – into the input vector of a binary classification model for self-collision detection. The results demonstrate the benefits of incorporating positional encoding, which enhances classification accuracy by enabling the model to better capture high-frequency variations, leading to a more detailed and precise representation of complex collision patterns. The manuscript shows that machine learning-based techniques, such as lightweight multilayer perceptrons (MLPs) operating in a low-dimensional feature space, offer a faster alternative for collision checking than traditional methods that rely on geometric approaches, such as triangle-to-triangle intersection tests and Bounding Volume Hierarchies (BVH) for mesh-based models.
[1] B. Kulecki, D. Belter, Improving Machine Learning-Based Robot Self-Collision Checking with Input Positional Encoding, Foundations of Computing and Decision Sciences – 2025, vol. 50(3), pp. 383-402, 2025