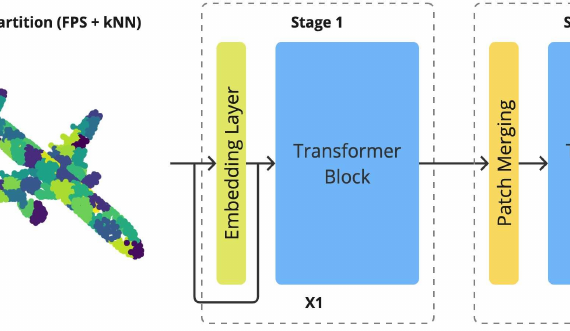
We are happy to announce that our paper entitled “Pointy – A Lightweight Transformer for PointCloud Foundation Models” was presented during 22nd International Conference Advanced Concepts for Intelligent Vision Systems (ACIVS 2025). Foundation models for point cloud data have recently grown in capability, often leveraging extensive representation learning from language […]
Daily Archives: March 26, 2026
2 posts
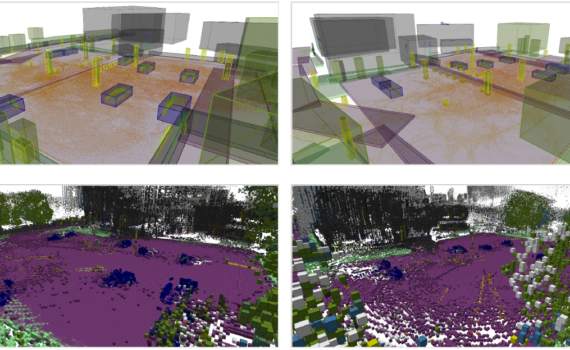
Our article “A Comparison of Segmentation Methods for Semantic OctoMap Generation”. This study presents a comparative evaluation of different semantic segmentation methods and examines the impact of input image resolution on the accuracy of 3D semantic environment reconstruction, inference time, and computational resource usage. The experiments were conducted using an […]